


Arduino Joystick Controller

Perihal Arduino Joystick Controller
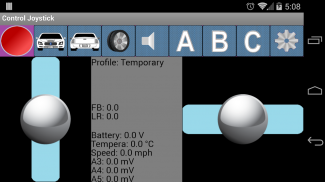
***This application is meant to control an Arduino based RC car over Bluetooth.
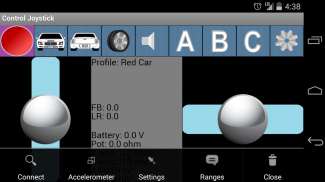
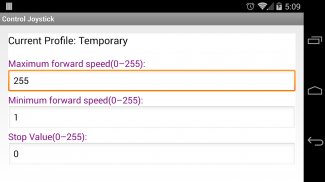
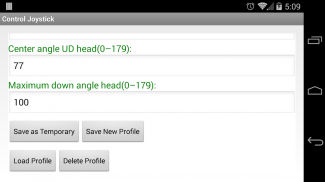
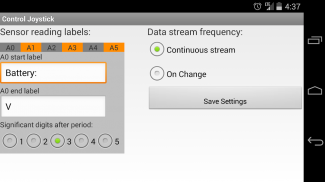
If you want to precisely control your Bluetooth enabled Arduino RC car, this application lets you do that. Composed of two joysticks, you can independently control the car's steering and speed. You can also set the steering and speed ranges from within the application. And in case you have more that one car, each one can have its one set of ranges. In case you have a tank, you can control its cannon by just toggling a button. And since the Arduino can read sensor values, the application is able to receive six independent readings. The first two are floating point readings, while the remaining four are a single byte long. The application sends a command every 50ms. This feature lets the car detect when it is out of range, in which case it'll stop before crashing.
Please visit the tutorial page for the Arduino program and circuit schematics.
</div> <div jsname="WJz9Hc" style="display:none">*** Permohonan ini bertujuan untuk mengawal sebuah kereta RC Arduino berdasarkan pada Bluetooth.
Jika anda mahu mengawal tepat Bluetooth anda kereta Arduino RC, permohonan ini membolehkan anda berbuat demikian. Terdiri daripada dua joysticks, anda bebas boleh mengawal stereng kereta dan kelajuan. Anda juga boleh menetapkan stereng dan kelajuan berkisar dari dalam aplikasi. Dan sekiranya anda mempunyai lebih dari satu kereta, masing-masing boleh mempunyai satu set sebanyak julat. Dalam kes anda mempunyai tangki, anda boleh mengawal meriam dengan hanya menogel butang. Dan sejak Arduino boleh membaca nilai-nilai sensor, permohonan itu boleh menerima enam bacaan bebas. Kedua-dua pertama terapung bacaan ketika, manakala empat adalah bait panjang. Permohonan itu menghantar arahan setiap 50ms. Ciri ini membolehkan kereta mengesan apabila ia adalah di luar kawasan, di mana ia akan berhenti sebelum terhempas.
Sila lawati halaman tutorial untuk program Arduino dan skema litar.</div> <div class="show-more-end">
Arduino Joystick Controller - Versi 1.2
(11-03-2016)
Arduino Joystick Controller - Maklumat APK
Versi APK: 1.2Pakej: com.andico.control.joystickVersi Terkini Arduino Joystick Controller
Versi lain














Aplikasi dalam kategori sama









